تبدیل لاپلاس (Laplas transform) به سادگی با سیگنالهایی که تبدیل فوریه ندارند، از طریق معرفی یک تابع نمایی میرا درون انتگرال تبدیل، تعامل میکند. در این مقاله نگاهی به تعمیم تبدیل فوریه تحت عنوان تبدیل لاپلاس خواهیم داشت. این کار، سنگ بنایی در مسیر حرکت به سمت تبدیل Z است که به طور گسترده در پردازش سیگنالهای زمان-گسسته استفاده میشود به خصوص در تئوری کنترل.
اجازه دهید تا اشاره به تبدیل Z در مقاله بعدی را از طریق تعمیم تبدیل فوریه به یک تبدیل دیگر جذاب کنیم. اما چرا نیاز داریم که چیزی به خوبی و مفیدی و همچنین کاملی تبدیل فوریه را تعمیم دهیم؟
تابع شیب واحد \( r(t) \) در شکل ۱ را در نظر بگیرید. با توجه به اینکه تابع پله واحد \( u(t) \) برای \( t \) منفی، صفر است و برای \( t \) مثبت، یک و اینکه مقدار آن در \( t=0 \) بین صفر و یک متغیر تعریف میشود (اجازه دهید تا در مورد آن نگران نباشیم)، تابع شیب واحد به شکل \( r(t)=tu(t) \) قابل تعریف است.
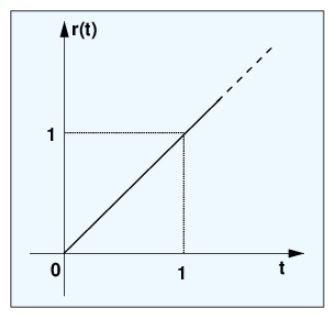
شکل ۱- تابع شیب واحد \( r(t)=tu(t) \)
تبدیل فوریه \( r(t) \) چیست؟ میتوانیم کار را با نوشتن عبارت این تبدیل، شروع کنیم:
$$ R(f)=\mathcal{F}[r(t)] = \int_{-\infty}^{+\infty}tu(t) e^{-i2 \pi ft} dt $$
میتوان برای این تبدیل فوریه، عبارتی یافت ولی این کار شامل مشتقگیری از تابع ضربه میشود، بنابراین به شکل یک تابع خوشرفتار وجود نخواهد داشت و به شکل یک تابع عام نیز نمیتوان با آن تعامل کرد.
همچنین توابع تصادفی همچون نویز گوسین (Gaussian Noise) و توابع نمایی مشابه \( e^{at}u(t) \) برای \( a>0 \) را در نظر بگیرید. این توابع، تبدیل فوریه ندارند. برای نماییها و شیبها، مساله اصلی آن است که توابع مذکور با افزایش \( t \)، زیاد میشوند (یا هر متغیر مستقل دیگری) و بنابراین انتگرالی که در حالت حدی شامل جمع مقادیر این توابع صعودی میشود، همگرا نخواهد شد. برای مسیرهای مشخص و نمونه از فرآیندهای تصادفی همچون فرآیند گوسین یا سیگنال مخابراتی BPSK (Binary Phase Shift Keying)، حد مورد نظر در تبدیل فوریه، به هیچ مقدار مشخصی همگرا نمیشود، با این که همچون سیگنال شیب یا نمایی، دچار واپاشی و افزایش ناگهانی نمیشود.
یک راهحل برای این عدم همگرایی در تبدیل فوریه، معرفی یک فاکتور میرا و کاهشی درون انتگرال تبدیل برای اطمینان از عدم افزایش سیگنال در طول زمان به میزانی که باعث واگرایی انتگرال میشود، است. برای مثال، اگر تابع شیب واحد در یک نمایی واحد \( e^{-t} \) ضرب شود و از نتیجه انتگرال بگیریم، یک عدد محدود بدست خواهیم آورد. این میراسازی نمایی در شکل ۲ نمایش داده شده است.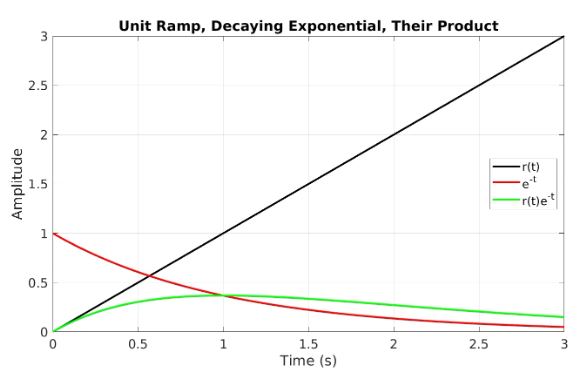
شکل ۲- نمایش قدرت یک فاکتور نمایی میرا برای تبدیل تابع غیرقابلانتگرال مشابه \( r(t)=tu(t) \) به تابع انتگرالپذیر.
نمایی \( e^{-at} \) به سرعت به مقدار صفر میل میکند و اندازه عدد مثبت \( a \) آن را کنترل میکند و اینکه هرگز به صفر نمیرسد، بنابراین انتخاب مناسبی برای حفظ ساختار سیگنالی که در آن ضرب میشود ( از آنجا که هرگز صفر نمیشود و هیچ مقداری از آن تابع در انتگرالگیری از بین نمیرود) و اطمینان از اینکه فارغ از سرعت افزایش تابع مورد نظر با زمان، قابل کنترل و کاهش به سمت مقادیر کنترل شده خواهد بود، است.
بنابراین، برای ایجاد تبدیل مناسب برای یک سیگنال که تبدیل فوریه ندارد، یک فاکتور \( e^{-\sigma t} \) با مقدار حقیقی \( \sigma \) به شکل زیر وارد تبدیل فوریه میشود:
$$ \int_{-\infty}^{+\infty} \underbrace{x(t)}_\textrm{Signal} \underbrace{e^{-\sigma t}}_\textrm{Damping Factor} \underbrace{e^{-i2 \pi ft} dt}_\textrm{Sine Wave} $$
حال اجازه دهید تا متغیر \( s \) را برابر با \( \sigma+i2 \pi f \) فرض کنیم. سپس تبدیل مورد نظر ما به شکل زیر میشود:
$$ X(s)=\int_{-\infty}^{\infty}x(t) e^{-st}dt $$
که تبدیل لاپلاس \( x(t) \) نام دارد. در بیشتر مواقع، ما میخواهیم این تبدیل را به سیگنالهایی اعمال کنیم که برای مقادیر زمان منفی، صفر هستند، و بنابراین تبدیل لاپلاس، یکطرفه خواهد بود و معمولا به شکل زیر نوشته میشود:
$$ X(s)=\int_{0}^{\infty}x(t) e^{-st}dt $$
اما، تبدیل دوطرفه نیز استفاده میشود. تبدیل یکطرفه، که قابل اعمال به سیگنالهایی است که برای زمانهای منفی، صفر هستند، به طور ویژه برای تبدیل سیستمهای با پاسخ ضربه علّی مناسب است که این خاصیت را بالقوه دارند.
مزیت تبدیل لاپلاس در مقایسه با تبدیل فوریه، آن است که با توابعی که باید تحت تبدیل قرار گیرند، میتوان ضعیف رفتار کرد، مثلا توابعی متناظر با سیستمهای ناپایدار که در نتیجه خروجی آنها بدون حد افزایش مییابد.
اگر تبدیل فوریه \( X(f) \) برای سیگنال \( x(t) \) وجود داشته باشد، تبدیل لاپلاس آن، \( X(s) \) با قرار دادن \( \sigma=0 \Rightarrow s=i2 \pi f \) بدست میآید. با توجه به قرارداد نگارشی که در تبدیل فوریه نیز استفاده میشود، تبدیل لاپلاس از طریق اپراتور \( \mathcal{L}[.] \) نمایش داده میشود و همینطور فلش دوطرفه \( \Leftrightarrow \) به شکل زیر:
$$ X(s)=\mathcal{L}[x(t)]=\int_{0}^{\infty}x(t)e^{-st}dt \ \ \ \ \ \ \ \ X(s) \Leftrightarrow x(t). $$
خطی بودن
از آنجاییکه تبدیل لاپلاس به صورت یک انتگرال تعریف میشود و انتگرال ذاتا یک عملگر خطی است، میتوان چنین استنباط کرد که تبدیل لاپلاس نیز همچون تبدیل فوریه خطی است. این بدین معنی است که تبدیل لاپلاس مجموع چند سیگنال مقیاس شده برابر با مجموع تبدیل لاپلاسهای مقیاس شده است:
$$ \mathcal{L}[a_1 x_1(t)+a_2 x_2(t)]=a_1 \mathcal{L}[x_1(t)] + a_2 \mathcal{L}[x_2(t)] = a_1 X_1(s)+a_2 X_2(s) $$
خطی بودن به ما کمک میکند تا تبدیل لاپلاس سیگنالهای پیچیده را با امکان بسط آنها به مجموع سیگنالهای سادهتر و یافتن تبدیل لاپلاس هر کدام از آنها و در نهایت جمع آنها با یکدیگر، محاسبه کنیم.
ناحیه همگرایی در صفحه s
برای چه مقادیری از \( \sigma \) یک تبدیل لاپلاس خاص، وجود خواهد داشت؟ پاسخ این سوال معمولا به صورت یک نمودار در صفحه s بیان میشود که محور عمودی آن \( \omega \) است که برابر با \( 2 \pi f \) است یا به طور ساده \( f \) و محور افقی با \( \sigma \) نشان داده میشود. اجازه دهید تا نگاهی به ناحیه همگرایی اولین تبدیل لاپلاسی که محاسبه میکنیم، داشته باشیم: تبدیل لاپلاس تابع نمایی \( f(t)=e^{-at}u(t) \).
این کار را از طریق محاسبات ریاضی انجام میدهیم. با اعمال تعریف تبدیل لاپلاس داریم:
$$ \mathcal{L} [f(t)]=F(s)=\int_{0}^{\infty} e^{-at} u(t) e^{-st} dt $$
$$ =\int_{0}^{\infty} e^{-(a+s)t} dt $$
به طور استاندارد این انتگرال برابر است با:
$$ F(s) = \frac{1}{-(a+s)} e^{-(a+s)t} \Big|_{t=0}^{\infty} $$
$$ = \frac{1}{-(a+\sigma + i2\pi f)} e^{a+\sigma +i2\pi f)} \Big|_{t=0}^{\infty} $$
اگر \( (a+\sigma)>0 \) آنگاه \( \lim_{t \to \infty} e^{-(a+\sigma +i 2 \pi f)} \to 0 \) و تقسیم بر صفر نیز نخواهیم داشت زیرا: \( |a+\sigma +i2\pi f|\neq 0 \) برای هر مقدار \( f \). با شرط \( a+\sigma>0 \) خواهیم داشت:
$$ F(s) = \frac{1}{a+s}, \ \ \ \ \sigma >-a $$
پارامتر همگرایی \( \sigma \) در \( s \) باید بزرگتر از \( -a \) باشد تا انتگرال وجود داشته باشد که از طریق مثبت یا منفی بودن $a$ قابل دستیابی است (اینکه نمایی با افزایش زمان \( t \)، کاهش یا افزایش مییابد).
زمانیکه \( a>0 \)، نمایی در حال کاهش است و ناحیه همگرایی شبیه ناحیه سایه زده شده در شکل ۳ است. چون \( a \) مثبت است، \( -a \) منفی خواهد بود و ناحیه همگرایی شامل بخشی از صفحه \( s \) که \( \sigma<0 \) و تمام نیمصفحه \( \sigma \ge 0 \) خواهد بود. به طور خاص، ناحیه همگرایی شامل محور \( f \) است که در آن \( \sigma=0 \). این بدان معنی است که فرمول تبدیل لاپلاس با جایگزین کردن \( \sigma=0 \) در فرمول بالا، که تبدیل فوریه سیگنال \( e^{-at}u(t) \) است، همچنان مجاز خواهد بود:
$$ F(f)=F(s|\sigma=0)=\frac{1}{a+i2 \pi f} $$
که با تبدیل فوریه سیگنال نمایی میرا که از طریق محاسبه مستقیم تبدیل فوریه بدست میآید، مطابقت دارد.
نکته مهم آن است که اگر ناحیه همگرایی تبدیل لاپلاس شامل محور \( f \) باشد، تبدیل فوریه میتواند به سادگی از طریق تبدیل لاپلاس محاسبه شود. اگر ناحیه همگرایی شامل محور \( f \) نباشد، آنگاه تبدیل فوریه از طریق تبدیل لاپلاس قابل دستیابی نیست. تبدیل فوریه در چنین شرایطی به صورت یک تابع عادی وجود ندارد اما در صورت امکان استفاده از توابع تعمیم داده شده همچون توابع ضربه، ممکن است وجود داشته باشد. به زودی با چند مثال این موضوع را بررسی خواهیم کرد.
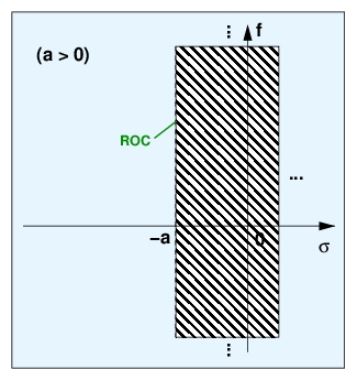
شکل ۳- نمایش ناحیه همگرایی برای انتگرال تبدیل لاپلاس زمانیکه تابع مورد نظر برای محاسبه تبدیل لاپلاس، نمایی به شکل \( e^{-at}u(t) \)با \( a \) مثبت است. دقت کنید که ناحیه همگرایی شامل محور \( f \) میشود که متناظر با وجود داشتن تبدیل فوریه است و با قرار دادن \( \sigma=0 \) در فرمول \( F(s)=F(\sigma+i2 \pi f) \) قابل محاسبه است.
اگر \( a<0 \) آنگاه ناحیه همگرایی مطابق شکل ۴، به طور کامل در نیمصفحه راست قرار میگیرد. محور \( f \) در این ناحیه قرار ندارد، بنابراین تبدیل فوریه نمایی افزایشی وجود نخواهد داشت. 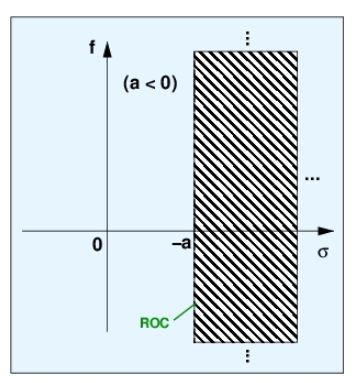
شکل ۴- ناحیه همگرایی نمایی افزایشی یا نامیرا
اما در مورد حالت \( a=0 \) چطور؟ تابع مورد نظر به شکل \( f(t)=e^{-at}u(t)=e^0 u(t)=u(t) \) خواهد بود که همان تابع پله واحد است. شرط روی \( \sigma \) باقی میماند که \( \sigma>-a \Rightarrow \sigma>0 \) است و تحت این شرایط:
$$ u(t) \Leftrightarrow \frac{1}{a+s}=\frac{1}{s} \ \ \ \ \ \ \ \sigma >0 $$
ممکن است به یاد بیاورید که تبدیل فوریه تابع پله واحد، یک تابع خوش رفتار نیست:
$$ \mathcal{F}[u(t)]=U(f)=\frac{1}{2}\delta (f)+\frac{1}{i2 \pi f} $$
که این سوال را مطرح میکند که در تابع \( U(f) \) در نقطه \( f=0 \) چه اتفاقی در جریان است. این عبارت را با تبدیل لاپلاس عبارت \( 1/s \) با \( \sigma>0 \) مقایسه کنید. در اینجا وضعیت کمی بهتر است اما نه به اندازه کافی.
تا بدین جای کار، ما تبدیل لاپلاسهای تابع پله واحد و تابع نمایی را داریم. اگر بخواهیم این تبدیل را به مسائل مرتبط با سیگنالها و سیستمها اعمال کنیم، خیلی بیشتر از این باید بدانیم. بدین منظور، میتوانیم انتگرال تبدیل را به تعدادی از سیگنالهایی که معمولا با آنها مواجه میشویم اعمال کنیم اما معمولا سادهتر است اگر تلاش کنیم کمی هوشمندانهتر عمل کنیم. میخواهیم بدانیم که چگونه عملیات معمول در ریاضی همچون تغییر مقیاس، مشتقگیری، انتگرالگیری، کانولوشن، ضرب و غیره، روی تبدیل یک سیگنال اثر میگذارد. آنگاه در صورت مواجهه با یک سیگنال جدید، تلاش میکنیم تا آن سیگنال را بر حسب یک یا چند عملیات ریاضی معمول روی یک سیگنال که از ابتدا تبدیل لاپلاس آن را میدانیم، بیان کنیم.
عملیات ریاضی
تغییر مقیاس با یک مقدار ثابت
تبدیل لاپلاس سیگنال \( af(t) \) برای هر مقدار ثابت \( a \) مختلط، با فرض اینکه بدانیم \( F(s) \Leftrightarrow f(t) \)، چیست؟ از آنجاییکه میدانیم تبدیل لاپلاس، خطی است، به سادگی میتوان فهمید که تبدیل سیگنال تغییر مقیاس داده شده برابر با تبدیل تغییر مقیاس داده شده است:
$$ af(t) \Leftrightarrow aF(s). $$
مشتقگیری
فرض کنیم یک تابع مشتقپذیر \( f(t) \) داریم:
$$ f^{\prime} (t)=\frac{d}{dt} f(t) $$
که تبدیل لاپلاس آن \( F(s) \) است. مقدار \( \mathcal{L} [f^{\prime} (t)] \) چیست؟ انتگرال تبدیل لاپلاس به شکل زیر است:
$$ \mathcal{L} [f^{\prime} (t)] = \int_{0}^{\infty} f^{\prime} (t) e^{-st} dt. $$
میتوانیم برای محاسبه این نوع انتگرال از روشی تحت عنوان انتگرالگیری جزء به جزء (integration by Parts) استفاده کنیم:
$$ \int_{a}^{b} u(x) v^{\prime} (x) dx = u(x) v(x) \Big|_{x=a}^{b} – \int_{a}^{b} u^{\prime} (x) v (x) dx $$
که در آن:
$$ \begin{aligned} v^{\prime} (x) = \frac{d}{dx} v(x) \\ \\ u^{\prime} (x) = \frac{d}{dx} u(x) \end{aligned} $$
گام اول مهم است: \( u(t) \) و \( v^{\prime} (t) \) را از عبارت زیر انتگرال باید به درستی شناسایی کنید. انتخاب ما به صورت \( u(t)=e^{-st} \) و \( v^{\prime} (t)=f^{\prime} (t) \) است:
$$ \mathcal{L} [f^{\prime} (t)] = \int_{0}^{\infty} \underbrace{ (e^{-st}) }_\textrm{u} \underbrace{ (f^{\prime} (t)) }_\textrm{ v’ } dt $$
با این انتخاب برای \( u \) و \( v^{\prime} \)، میتوانیم \( u^{\prime} \) و \( v \) را تشخیص دهیم:
$$ v(t)=f(t) $$
$$ u^{\prime} (t) = -se^{-st} $$
بدین شکل، با دقت قاعده انتگرالگیری جزء به جزء را دنبال میکنیم:
$$ \mathcal{L} [f^{\prime}(t)]=e^{-st} f(t) \Big|_{t=0}^{\infty} – \int_{0}^{\infty} (-se^{-st}) f(t) dt $$
اگر \( \sigma>0 \) آنگاه همچنان که \( t \rightarrow \infty \) خواهیم داشت: \( e^{-st}=e^{-\sigma t}e^{-i2 \pi ft} \rightarrow 0 \). بنابراین:
$$ \mathcal{L} [f^{\prime}(t)]=0-e^{-s(0)} f(0) +s \int_{0}^{\infty} f(t) e^{-st} dt $$
$$ =sF(s)-f(0) $$
در اینجا ما \( f(0) \) را به فرم \( f(0^-) \) تفسیر میکنیم، که مقدار تابع درست قبل از صفر است. هدف، مقابله با برخی مشکلات مرتبط با ناپیوستگی در \( t=0 \) است که ممکن است برای پاسخ ضربه برخی سیستمهای خطی تغییرناپذیر با زمان علّی رخ دهد. بنابراین، جواب نهایی برای مشتق \( f(t) \) به شکل زیر است:
$$ f^{\prime} (t) \Leftrightarrow s F(s) – f(0^-) $$
به عنوان یک مقدمه، میدانیم که \( U(s)=1/s \Leftrightarrow u(t) \) و \( u^{\prime}(t) = \delta (t) \). آنگاه \( \Delta (s)=1 \Leftrightarrow \delta (t) \) که با عبارت \( \mathcal{F}[\delta (t)]=1 \) سازگاری دارد همانطور که قبلا دیدیم.
به سرعت میتوان نتیجه گرفت که تبدیل لاپلاس مشتق دوم تابع \( f(t) \) برابر است با:
$$ f” (t) \Leftrightarrow s^2 F(s) -sf(0^-) -f”(0^-) $$
انتگرالگیری
حال بیایید نگاهی به عملیات معکوس مشتقگیری، یعنی انتگرالگیری داشته باشیم. تبدیل لاپلاس \( \int_{0}^{t}f(\tau ) d\tau \) چیست؟
$$ \mathcal{L}\left[\int_{0}^{t} f(\tau) d \tau \right] = \mathcal{L} [g(t)] =\int_{0}^{\infty} g(t) e^{-st} dt $$
اجازه دهید که مجدد از روش انتگرالگیری جزء به جزء استفاده کنیم. از آنجاییکه انتگرال \( e^{-st} \) آسان است، آن را برای بخش \( v^{\prime} \) انتخاب میکنیم:
$$ u^{\prime} (t) = \frac{d}{dt} g(t) =\frac{d}{dt} \int_{0}^{t} f(\tau) d \tau = f(t) $$
$$ v(t) =\int v^{\prime} (t) dt = \frac{1}{-s} e^{-st} $$
فرمول ما به فرم زیر تبدیل میشود:
$$ \mathcal{L} [g(t)] = \mathcal{L} \left[\int_{0}^{t} f(\tau) d\tau \right] $$
$$ = g(t) \left(\frac{-1}{s} \right) e^{-st} \Big|_{t=0}^{\infty} – \int_{0}^{\infty} f(t) \left (\frac{-1}{s} e^{-st} \right) $$
اگر \( \sigma >0 \) آنگاه \( \lim_{t \to \infty} g(t) \) محدود خواهد بود و \( g(0)=0 \) و هیچ تابع ضربهای برای \( f(t) \) در مبدا وجود نخواهد داشت. بنابراین بخش اول سمت راست معادله بالا صفر است. بدین ترتیب معادله به شکل زیر تغییر میکند:
$$ \mathcal{L} [g(t)] = \frac{1}{s} \int_{0}^{\infty} f(t) e^{-st} dt = \frac{1}{s} F(s) $$
که مطابق انتظار است زیرا اثر مشتقگیری (فاکتور \( s \)) اثر انتگرالگیری را معکوس میکند (فاکتور \( 1/s \)). نتیجه نهایی به شکل زیر است:
$$ \int_{0}^{t} f(\tau) d\tau \Leftrightarrow \frac{1}{s} F(s) \ \ \ \ \ \ \ \sigma>0 $$
به عنوان یک مقدمه، این را در نظر بگیرید که تابع شیب واحد \( r(t)=tu(t) \) در واقع انتگرال تابع پله واحد است:
$$ r(t) = tu(t) = \int_{0}^{t} u(\tau) d\tau $$
این حقیقت درباره \( R(s) \) یا همان تبدیل لاپلاس تابع شیب واحد چه نتیجهای میدهد؟
تغییر مقیاس زمانی
فرض کنید که \( F(s) \Leftrightarrow f(t) \). حاصل \( \mathcal{L}[f(at)] \) چیست؟
در ابتدا، بیایید تا حالت \( a=0 \) را در نظر نگیریم زیرا در غیر این صورت تابعی از زمان نخواهیم داشت. در واقع برای این حالت تبدیل لاپلاس \( f(0) \) مطرح میشود که همان تبدیل لاپلاس یک مقدار ثابت است و از قبل میدانیم که برابر با \( f(0)/s \) است. اما حالت \( a<0 \) را نیز بررسی نمیکنیم زیرا این مقادیر \( a \) نه تنها محور زمان را فشرده و گسترده میکنند بلکه تمام مقادیر تابع مورد نظر برای زمانهای منفی با مقدار مشابه در زمانهای مثبت، جایگزین میکنند. همچنان که \( F(s) \) نیز خود تنها برای تابع \( f(t) \) در زمانهای \( t \ge 0 \) محاسبه میشود. بنابراین ما نمیتوانیم در مورد رابطه بین \( \mathcal{L}[f(t)] \) و \( \mathcal{L}[f(at)] \) اگر \( a<0 \) باشد، چیزی بگوییم. این گذاره به این نکته منتهی میشود که مجموعه مقادیر \( a \) که میتوان در نظر گرفت، اعداد حقیقی بزرگتر از صفر است.
اجازه دهید تا به سراغ محاسبه انتگرال تبدیل لاپلاس سیگنال تغییر مقیاس داده شده برویم:
$$ \mathcal{L} [f(at)] = \int_{0}^{\infty} f(at)e^{-st} dt $$
تغییر متغیرهای زیر را برای محاسبه انتگرال در نظر بگیرید:
$$ \begin{cases} v \ \ \ \ \ \ = at \\ t \ \ \ \ \ \ \ = v/a \\ dv \ \ \ \ \ = a.dt \\ t=0 \ \ \Rightarrow v=0 \\ t \to \infty \ \ \Rightarrow v \to \infty \end{cases} $$
این جایگزینی منجر به معادله جدید زیر میشود:
$$ \begin{aligned} \mathcal{L} [f(at)] = \int_{0}^{\infty} f(v) e^{-sv/a}(a/a) dv \\ \\ =\frac{1}{a} \int_{0}^{\infty} f(v) e^{-(s/a)v} dv \\ \\ =\frac{1}{a} F(s/a) \end{aligned} $$
نتیجه نهایی به فرم فشرده عبارت است از:
$$ f(at) \Leftrightarrow \frac{1}{a} F(s/a) $$
ضرب با \( t \) در حوزه زمان
در اینجا علاقمند هستیم تا تبدیل لاپلاس \( \mathcal{L}[tf(t)] \) را بدانیم، اما اجازه دهید در ابتدا پاسخ را حدس بزنیم و سپس برای تایید آن در جهت عکس کار کنیم. میدانیم که \( sF(s) \) تبدیل مشتق تابع \( f(t) \) است، بنابراین اگر یک رابطه دوگان (duality) بین زمان \( t \) و فرکانس مختلط \( s \) در تبدیل لاپلاس وجود داشته باشد، ممکن است بتوان حدس زد که تبدیل \( tf(t) \)، مشتق \( F(s) \) است. و از آنجاییکه تبدیل لاپلاس و تبدیل فوریه رابطه نزدیکی با هم دارند، و تبدیل فوریه این رابطه دوگان را دارا نیست، دلیل خوبی برای این حدس خود داریم. بیایید بررسی کنیم:
$$ \begin{aligned} \frac{d}{ds} F(s) = \frac{d}{ds} \int_{0}^{\infty} f(t) e^{-st} dt \\ \\ =\int_{0}^{\infty} f(t) \left (\frac{d}{ds} e^{-st} \right ) dt \\ \\ =\int_{0}^{\infty} f(t) (-t) e^{-st} dt \\ \\ =- \int_{0}^{\infty} (t f(t) )( e^{-st} dt \\ \\ =t f(t) \Leftrightarrow -\frac{d}{ds} F(s) \end{aligned} $$
فارغ از علامت منفی در عبارت بالا، حدس مورد نظر تایید میشود.
تاخیر (شیفت زمانی)
نسخه شیفت داده شده \( f(t) \) برابر با \( f(t-t_0) \) با \( t_0 \ge 0 \) است. این تاخیر، سیگنال را در زمان به جلو میراند (در جهت راست محور زمان). تبدیل لاپلاس سیگنال تاخیر یافته بر حسب تبدیل سیگنال اصلی \( F(s) \) چیست؟ (شما ممکن است بر اساس رفتار سری فوریه و تبدیل فوریه برای سیگنالهای تاخیر یافته، پاسخ را حدس بزنید).
ما باید درباره تاخیر \( f(t) \) در اینجا کمی مراقب باشیم زیرا ممکن است برای زمانهای منفی، مقدار تابع غیرصفر باشد و زمانیکه \( t_0 >0 \)، برخی از توابع تعریف شده برای شیفتهای زمانی منفی به سمت زمانهای مثبت میروند و هیچ بخشی از \( f(t) \) برای یافتن \( F(s) \) استفاده نشده باشد.
به همین دلیل چیزی که در نظر میگیریم، \( f(t) u(t) \) است که این اطمینان را میدهد که مقدار تابع برای زمانهای منفی و نسخه تاخیر یافته آن، \( f(t-t_0) u(t-t_0) \)، صفر است. در غیر اینصورت، اگر بخواهیم با بخش زمان-منفی تابع \( f(t) \) کار کنیم، میتوانیم از تبدیل لاپلاس دوطرفه استفاده کنیم.
مستقیم به سمت تعریف تبدیل لاپلاس میرویم:
$$ \mathcal{L} [f(t-t_0) u(t-t_0)] = \int_{0}^{\infty} f(t-t_0) u(t-t_0) e^{-st} dt $$
ما به تغییر متغیرهای زیر نیاز داریم:
$$ \begin{cases} v \ \ \ \ \ \ = t-t_0 \\ t \ \ \ \ \ \ = v+t_0 \\ dv \ \ \ \ \ = dt \\ t=0 \ \ \Rightarrow v=-t_0 \\ t \to \infty \ \ \Rightarrow v \to \infty \end{cases} $$
با اعمال این تغییرات خواهیم داشت:
$$ \mathcal{L} [f(t-t_0) u(t-t_0)] = \int_{-t_0}^{\infty} f(v) u(v) e^{-s(v+t_0)} dv $$
از آنجاییکه \( t_0 >0 \) و عبارت زیر انتگرال برای \( v \in [-t_0,0^-] \) صفر است، داریم:
$$ \mathcal{L} [f(t-t_0) u(t-t_0)] = \int_{-t_0}^{\infty} f(v) u(v) e^{-sv} dv e^{-s t_0} $$
یا
$$ f(t-t_0) u(t-t_0) \Leftrightarrow F(s) e^{-s t_0}, \ \ \ \ \ \ \ \ t_0 \ge 0 $$
تاخیر (شیفت \(s \) )
اگر تبدیل لاپلاس را با مقدار \( a \) شیفت دهیم، \( F(s+a) \)، تابع زمانی متناظر با آن چیست؟ اگر ما تبدیل معکوس ساده به لحاظ محاسباتی داشتیم، در اینجا میتوانستیم آن را استفاده کنیم. اما از معرفی معکوس تبدیل لاپلاس تا اینجا، خودداری کردهایم (با دلیل خوبی)، و به همین دلیل اجازه دهید تا یک بار دیگر حدس بزنیم و ببینیم آیا این حدس به یک تحلیل ساده منجر میشود.
میدانیم که شیفت فرکانسی در تبدیل فوریه منجر به ضرب در نمایی مختلط در حوزه زمان سیگنال میشود:
$$ F(f-f_0) \Leftrightarrow f(t) e^{i 2 \pi f_0 t} $$
بنابراین میتوانیم حدس بزنیم که ضرب شکل موج حوزه زمان با عبارتی شبیه \( e^{at} \)، نسخه شیفت داده شده تبدیل لاپلاس را تولید خواهد کرد. بیایید روی آن کار کنیم:
$$ \begin{aligned} \mathcal{L} [e^{at} f(t) u(t)] = \int_{0}^{\infty} f(t) e^{-(s-a)t} dt \\ \\ =F(s-a) \end{aligned} $$
که نتیجه مطلوب را به دست میدهد:
$$ e^{-at} f(t) u(t) \Leftrightarrow F(s+a) $$
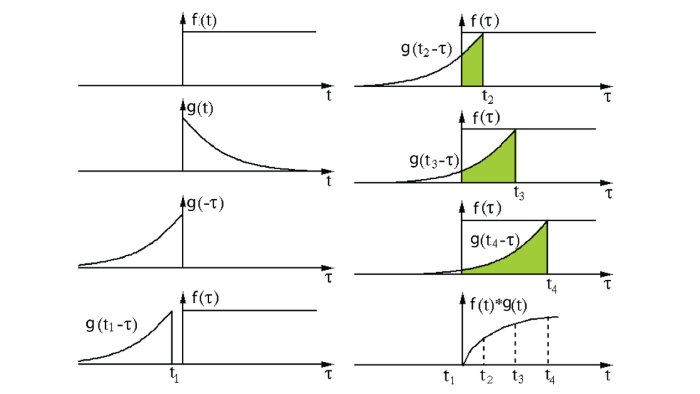
کانولوشن
فرض کنید که دو سیگنال علّی \( f(t)u(t) \) و \( g(t)u(t) \) داریم. کانولوشن آنها نیز یک سیگنال علّی است:
$$ [f(t)u(t)] \otimes [g(t)u(t)] = h(t) = h(t)u(t) $$
بنابراین، هر سه سیگنال از یک نوع هستند و استفاده از تبدیل لاپلاس یکطرفه کافی است.
حاصل \( \mathcal{L} [h(t)u(t)] \) چیست؟ میتوانیم دوباره حدس خوبی با توجه به قضیه کانولوشن داشته باشیم: \( F(s) G(s) \). اثبات آن ساده است و به عنوان تمرین به خواننده واگذار میشود.
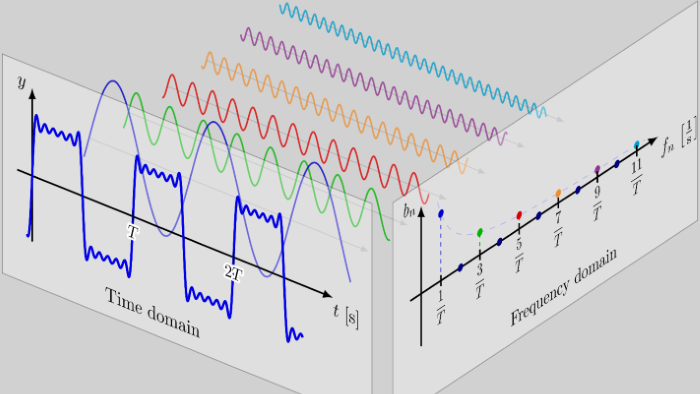
سیگنالهای متناوب
بیایید نگاهی به سیگنال متناوب عام داشته باشیم. فرض کنید که دوره تناوب سیگنال \( T>0 \)باشد. آنگاه ویژگی مشخص سیگنال متناوب \( f(t) \) آن است که \( f(t+T)=f(t) \) برای تمام اعداد حقیقی \( t \).
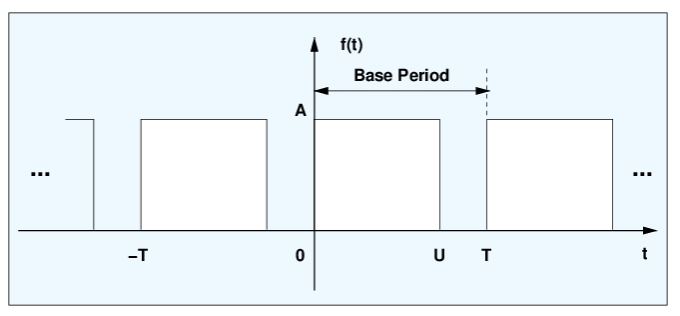
سیگنالهای متناوب را میتوان به شکلهای مختلفی نوشت زیرا تمام آن چیزی که لازم است این است که تابع روی یک بازه \( [t_1,t_1+T] \) در هر بازه دیگری همچون \( [t_1+kT,t_1+(k+t)T] \) تکرار میشود. قطار پالس مستطیلی متناوب در شکل زیر را در نظر بگیرید:
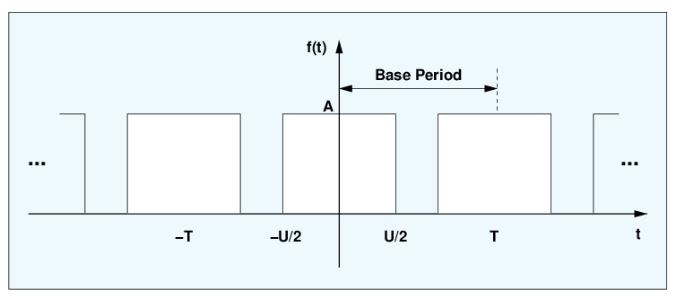
شکل ۵- قطار پالس مستطیلی متناوب \( (T>U) \)
با توجه به اینکه تابع \( rect(t) \) برابر با مقدار یک در بازه \( [-1/2,1/2] \) و صفر در سایر نقاط تعریف میشود، طبیعی است که \( f(t) \) در شکل بالا را به فرم زیر بیان کنیم:
$$ f(t) = \sum_{k=-\infty}^{\infty} A.rect((t-kT)/U) $$
اما برای تبدیل لاپلاسی که در اینجا مد نظر است، ما فقط بخش زمانهای غیرمنفی تابع را استفاده میکنیم. میتوانیم سیگنال را با استفاده از دوره تناوب اصلی نشان داده در شکل بالا، به فرمی بیان کنیم که با تبدیل لاپلاس سازگاری داشته باشد:
$$ p_0(t) = A.rect(2(t-U/4)/U) + A. rect(2(t-(T-U/4))/U) $$
آنگاه، کل سیگنال به شکل زیر قابل نوشتن است:
$$ f(t) = \sum_{k=-\infty}^{\infty} p_0(t-kT) $$
و بنابراین بخش زمان-مثبت سیگنال \( f(t) \) به سادگی به فرم جمع فشرده زیر قابل بیان است:
$$ f(t) = \sum_{k=0}^{\infty} p_0(t-kT), \ \ \ \ t \ge 0 $$
برای یافتن \( F(s)=\mathcal{L}[f(t)] \) در اینجا، میتوانیم از خصوصیات خطی بودن و تاخیر زمانی تبدیل استنباط کنیم تا به رابطه زیر برسیم:
$$ F(s) = \sum_{k=0}^{\infty} P_0(s) e^{-skT} $$
که در آن: \( P_0(s) \Leftrightarrow p_0(t) \ \ \ \)
برخی از تبدیلهای لاپلاس
حال اجازه دهید تا برخی از تبدیلهای لاپلاس را برای تعدادی از سیگنالهای ساده که معمولا در تحلیل سیگنال با آنها مواجه میشویم همچون تابع پله واحد \( u(t) \)، تابع شیب \( r(t)=t u(t) \)، توابع مثلثاتی، نمایی با بخش نمایی حقیقی، نمایی با بخش نمایی موهومی (امواج سینوسی)، قطار پالس مستطیلی و غیره را بدست آوریم.
تابع ضربه (تابع دلتا)
با تابع \( f(t)=\delta (t) \) شروع میکنیم که \( \delta(t) \) تابع ضربه یا تابع دلتا دیراک (Dirac’s delta) است. با اعمال تعریف تبدیل لاپلاس به طور مستقیم، به سرعت پاسخ را بدست میدهد که به دلیل خاصیت تابع ضربه و این حقیقت که انتگرال آن یک میشود، است.
$$ F(s) = \int_{0}^{\infty} \delta (t) e^{-st} dt = \int_{0}^{\infty} \delta (t) e^0 dt = 1 \\ $$
بنابراین:
\delta (t) \Leftrightarrow 1
تابع پله واحد
تابع پله واحد \( u(t) \) برای تمام زمانهای منفی، صفر است و برای زمانهای مثبت، یک است و در \( t=0 \) به طور متغیر تعر یف میشود:
$$ u(t) = \begin{cases} 0, \ \ \ \ t<0 \\ 1, \ \ \ \ t \ge 0 \end{cases} $$
برای \( f(t)=u(t) \)، داریم:
$$ \begin{aligned} F(s)=U(s)=\int_{0}^{\infty} u(t) e^{-st} dt = \int_{0}^{\infty} e^{ st} dt \\ \\ =\frac{e^{-st}}{-s} \Big|_{t=0}^{\infty} \end{aligned} $$
حال، اگر \( \sigma>0 \) آنگاه \( e^{-st}=e^{-\sigma t-i 2 \pi ft} \to 0 \) همچنان که \( t \to \infty \)، بنابراین:
$$ \begin{aligned} U(s)=0 – \left(\frac{1}{-s} \right) = \frac{1}{s} \\ \\ u(t) \Leftrightarrow \frac{1}{s} \end{aligned} $$
از سوی دیگر، میتوان مشاهده کرد که تابع پله واحد در واقع همان انتگرال تابع ضربه است:
$$ u(t) = \int_{-\infty}^{\infty} \delta (t) dt $$
و با استفاده از فرمول انتگرال در تبدیل لاپلاس خواهیم داشت:
$$ U(s) = \frac{1}{s} \mathcal{L} [\delta (t)] = \frac{1}{s} $$
تابع شیب
تابع شیب واحد \( r(t) \) به صورت زیر تعریف میشود:
$$ r(t) = tu(t) $$
که همچنین برابر است با:
$$ r(t) = \int_{0}^{t} u(v) dv $$
بنابراین، میتوانیم از قاعده انتگرالگیری که در بالا بدست آوردیم، استفاده کنیم تا فوراً به نتیجه مورد نظر دست یابیم:
$$ u(t) \Leftrightarrow \frac{1}{s} \Rightarrow r(t) \Leftrightarrow \frac{1}{s} \left(\frac{1}{s} \right)=\frac{1}{s^2} $$
همچنین، میتوانیم از قاعده ضرب در حوزه زمان با مقدار \( t \) در بالا نیز استفاده کنیم زیرا تابع هدف \( t u(t) \) است و از قبل \( U(s) \) را میدانیم:
$$ tf(t) \Leftrightarrow -\frac{d}{ds} F(s) \Rightarrow r(t) \Leftrightarrow -\frac{d}{ds} U(s) $$
و
$$ -\frac{d}{ds} \left(\frac{1}{s} \right) = \frac{d}{ds} (s^{-1}) = -(-1) s^{-2} = \frac{1}{s^2} $$
نمایی حقیقی
در اینجا \( f(t)=e^{at}u(t) \) که \( a \) یک عدد حقیقی است. اگر \( a>0 \)، سیگنال نمایی با افزایش \( t \) بدون محدودیت افزایش مییابد. اگر \( a<0 \)، همچنان که \( t \) افزایش مییابد، نمایی به سمت صفر میل میکند. اگر \( a=0 \)، مجدد تابع پله واحد را خواهیم داشت. بیایید این سیگنال نمایی را وارد انتگرال لاپلاس کنیم و نتیجه را بررسی کنیم:
$$ \begin{aligned} F(s) = \int_{0}^{\infty} e^{at} u(t) e^{-st} dt = \int_{0}^{\infty} e^{-(\sigma -a+i 2 \pi f)t} dt \\ \\ =\frac{1}{-(\sigma -a +i2 \pi f)} e^{-(\sigma -a+i 2 \pi f)t} \Big|_{t=0}^{\infty} \end{aligned} $$
اگر \( \sigma-a>0 \)، آنگاه \( e^{-(\sigma -a)t-i2 \pi ft)} \to 0 \) همچنان که \( t \to \infty \) که بدین معنی است که میتوانیم حدود بالا و پایین را به شکل زیر محاسبه کنیم:
$$ F(s) = \frac{1}{-(\sigma -a +i2 \pi f)}(0-1) = \frac{1}{s-a} \ \ \ \ (\sigma>a) $$
بنابراین داریم:
$$ e^{at} u(t) \Leftrightarrow \frac{1}{s-a}, \ \ \ \ \ \sigma>a $$
نمایی مختلط (موج سینوسی مختلط)
حال سیگنال نمایی با نمای موهومی، \( f(t)=e^{i 2 \pi f_0 t} \) که یک موج سینوسی مختلط است (با توجه به فرمول اویلر) را در نظر بگیرید. همان مسیری که برای نمایی حقیقی طی شد را تکرار میکنیم:
$$ \begin{aligned} F(s) = \int_{0}^{\infty} e^{i2 \pi f_0 t} e^{-st} dt = \int_{0}^{\infty} e^{-\sigma t -i 2 \pi (f-f_0)t} dt \\ \\ =\frac{e^{-\sigma t -i 2 \pi (f-f_0)t}}{-\sigma -i2 \pi (f-f_0)} \Big|_{t=0}^{\infty} \end{aligned} $$
اگر \( \sigma>0 \)، آنگاه \( e^{-\sigma t} \to 0 \) همچنان که \( t \to \infty \)، آنگاه انتگرال مورد نظر به شکل زیر بدست میآید:
$$ \begin{aligned} F(s) = 0 – \frac{1}{-\sigma -i2 \pi (f-f_0)}, \ \ \ \ \sigma>0 \\ \\ =\frac{1}{s-i2 \pi f_0}, \ \ \ \ \ \sigma>0 \end{aligned} $$
میتوان مشاهده کرد که تبدیل لاپلاس برای \( e^{bt} \) فارغ از حقیقی یا موهومی بودن \( b \)، یکسان است. از آنجاییکه ناحیه همگرایی در اینجا شامل \( \sigma=0 \) نمیشود، فرمول تبدیل لاپلاس نمایی مختلط، برای تعیین فرمول تبدیل فوریه نمایی مختلط که میدانیم یک تابع ضربه به مرکز \( f_0 \) است، قابل استفاده نیست.
توابع مثلثاتی
حال بیایید تبدیلهای لاپلاس توابع \( sin(2 \pi f_0 t) \) و \( cos(2 \pi f_0 t) \) را محاسبه کنیم.
تابع سینوسی
در اینجا \( f(t)=sin(2\pi f_0 t) \) که موج سینوسی با مقدار حقیقی و فرکانس \( f_0 \) (دوره تناوب \( T_0=1/f_0 \) و با فرض \( f_0 \ne 0 \)) است را در نظر میگیریم. از آنجاییکه تبدیل لاپلاس موج سینوسی مختلط \( e^{i2 \pi f_0 t} \) را میدانیم و همچنین میدانیم که موج سینوسی حقیقی به سادگی به شکل جمع دو موج سینوسی مختلط قابل بیان است:
$$ f(t) = sin(2 \pi f_0 t) = \frac{1}{2i}e^{i 2 \pi f_0 t} – \frac{1}{2i}e^{-i 2 \pi f_0 t} $$
میتوانیم ویژگی خطی تبدیل لاپلاس را در اینجا اعمال کنیم تا فوراً نتیجه را بدست آوریم. داریم:
$$ \begin{aligned} F(s) = \frac{1}{2i} \left ( \frac{1}{s-i 2 \pi f_0} \right) – \frac{1}{2i} \left ( \frac{1}{s+i 2 \pi f_0} \right) \\ \\ = \frac{1}{2i} \left ( \frac{s+i 2 \pi f_0 – s + i2 \pi f_0}{s^2 + (2 \pi f_0)^2} \right) \\ \\ =\frac{2 \pi f_0}{s^2 + (2 \pi f_0)^2} \end{aligned} $$
بنابراین:
$$ sin(2 \pi f_0 t) \Leftrightarrow \frac{2 \pi f_0}{s^2 + (2 \pi f_0)^2} $$
تابع کسینوسی
برای \( f(t)=cos(2 \pi f_0 t) \)، حداقل سه روش برای یافتن \( F(s) \) داریم: ۱- محاسبه مستقیم انتگرال لاپلاس (مشابه آنچه که برای تابع سینوسی انجام شد). ۲- استفاده از قاعده مشتقگیری، زیرا میدانیم \( \frac{d}{dx} sin(x) = cos(x) \). 3- استفاده از قاعده انتگرالگیری زیرا: \( -\int sin(x) = cos(x) \).
برای استفاده از قاعده مشتقگیری، که \( \mathcal{L}[f^{\prime}(t)] = sF(s) -f(0^-) \)، میتوان نوشت:
$$ cos(2 \pi f_0 t) = \frac{d}{dt} \left(\frac{1}{2 \pi f_0} sin(2 \pi f_0 t) \right) $$
بنابراین:
$$ \begin{aligned} \mathcal{L} [cos(2 \pi f_0 t)] = \mathcal{L} \left [\frac{1}{2 \pi f_0 } frac{d}{dt} \right] \\ \\ \frac{1}{2 \pi f_0 }s \left(\frac{2\pi f_0}{s^2+(2\pi f_0)^2} \right) – sin(0) \\ \\= \frac{s}{s^2+(2\pi f_0)^2} \end{aligned} $$
آنگاه نتیجه مطلوب را به شکل زیر داریم:
$$ cos(2 \pi f_0 t) \Leftrightarrow \frac{s}{s^2+(2\pi f_0)^2} $$
پالس مستطیلی زمان-مثبت
ما از قطار پالسهای متناوب با شکل پالسهای گوناگون در بخشهای مختلف پردازش سیگنال و تئوری مخابرات رادیویی و کاربردهای عملی آنها استفاده میکنیم. در مطالعه سیگنالها، نحوه نمایش آنها، سری فوریه و تبدیل فوریه، با قطار پالس مستطیلی مواجه شدهایم. همچنین پالس مدولاسیون BPSK میتواند به شکل یک قطار پالس مستطیلی که هر پالس به صورت تصادفی در مقادیر \( -1,+1 \) ضرب میشود، تصور کرد.
بنابراین بیایید در همین سطح، تحلیل سیگنال را پیش ببریم. در ابتدا میخواهیم تبدیل لاپلاس یک مستطیل زمان-مثبت ساده را که در شکل زیر نمایش داده شده است، محاسبه کنیم:
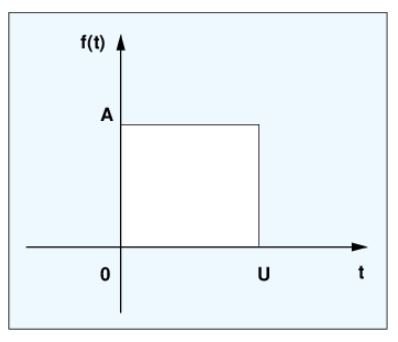
شکل ۶- تابع مستطیلی زمان-مثبت حول مقدار \( U/2 \) و با ارتفاع \( A \) و عرض \( U \). این تابع به شکل \( f(t)= A. rect((t-U/2)/U) \) قابل بیان است.
تبدیل \( f(t) \) در شکل بالا از طریق اعمال انتگرال لاپلاس به صورت سرراست قابل محاسبه است اما استفاده از نتایج قبلی راهکار مناسبتری است. به طور ویژه، این مستطیل به سادگی به شکل تفاضل دو تابع پله واحد قابل نوشتن است:
$$ f(t)=A. rect((t-U/2)/U) = u(t) – u(t-U) $$
از آنجا که \( u(t) \Leftrightarrow 1/s \) و \( u(t-U) \Leftrightarrow e^{-sU}/s \)، به سرعت میتوان نتیجه گرفت که:
$$ rect((t-U/2)/U) \Leftrightarrow \frac{A}{s}(1-e^{-s U}). $$
هر کدام از تبدیل لاپلاسهای دو تابع پله واحد دارای ناحیه همگرایی \( \sigma>0 \) هستند. اما اگر به طور مستقیم تعریف تبدیل لاپلاس را اعمال کنیم، داریم:
$$ \begin{aligned} F(s) = \int_{0}^{U} A e^{-st} dt \\ \\ =A \frac{e^{-st}}{-s} \Big|_{t=0}^{U} = \frac{A}{-s}(e^{-sU}-e^0) \\ \\=\frac{A}{s} (1-e^{-sU}) \end{aligned} $$
و هیچ محدودیتی روی \( \sigma \) در اینجا وجود ندارد، بنابراین ناحیه همگرایی شامل نقطه \( \sigma=0 \) میشود. به همین دلیل میتوانیم بررسی کنیم که آیا این تبدیل به تبدیل فوریه مستطیل زمانیکه \( \sigma=0 \) است تبدیل میشود یا خیر. میتوان نوشت:
$$ \begin{aligned} F(f) = F(s|\sigma=0) = \frac{A}{i2 \pi f}(1-e^{-i 2 \pi fU} \\\\ =A e^{-i \pi f U} \frac{e^{i \pi f U} -e^{-i \pi f U}}{i2 \pi f} \\ \\ =A e^{-i \pi f U} \frac{2i sin(\pi fU)}{2 i \pi f} = AU e^{-i \pi f U} sinc(\pi f U) \end{aligned} $$
که به طور حتمی، تبدیل فوریه یک مستطیل شیفت داده شده به مقدار \( U/2 \) با عرض \( U \) و ارتفاع \( A \) است.
مثلث متساویالساقین زمان-مثبت
لازم به یادآوری است که کانولوشن یک مستطیل با خودش، یک مثلث میشود. مثلث نشان داده شده در شکل زیر در واقع حاصل کانولوشن مستطیل نشان داده شده در شکل ۶ با خودش است اگر مقدار \( U \) در شکل ۶ با مقدار \( U/2 \) جایگزین شود. در این حالت، \( B=A^2 U/2 \).
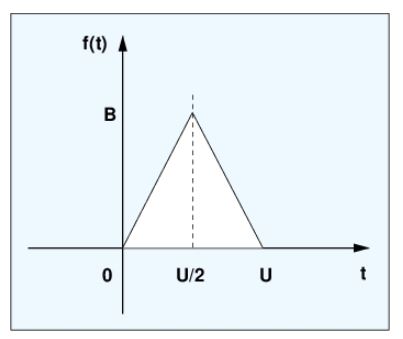
شکل ۷- مثلث متساویالساقین زمان-مثبت با ارتفاع \( B \)، قاعده \( U \) و به مرکز \( U/2 \).
میتوانیم معادلات مربوط به دو خطی که مثلث را تشکیل میدهند، بنویسیم و عبارت حاصل را در انتگرال تبدیل لاپلاس قرار دهیم، یا اینکه آن را به صورت کانولوشن یک مستطیل با خودش بنویسیم (و البته یک فاکتور تغییر مقیاس) و از رابطه کانولوشن استفاده کنیم. عبارت زیر را داریم:
$$ \begin{aligned} f(t) = \frac{2}{U} \left(\sqrt B rect \left(\frac{t-U/4}{U/2} \right) \otimes \sqrt B rect \left(\frac{t-U/4}{U/2} \right) \right) \\ \\ \frac{2B}{U} \left( rect \left(\frac{t-U/4}{U/2} \right) \otimes rect \left(\frac{t-U/4}{U/2} \right) \right) \end{aligned} $$
از آنجا که \( rect((t-U/4)/(U/2)) \Leftrightarrow \frac{1}{2}(1-e^{-sU/2} \)، داریم:
$$ F(s) = \frac{2B}{U s^2}(1-e^{-sU/2})^2 $$
قطار پالس مستطیلی نامتقارن
حال اجازه دهید نگاهی به قطار پالس مستطیلی نامتقارن در شکل ۸ داشته باشیم. دقت کنید که این یک نسخه شیفت داده شده (شیفت زمانی) از نمونه قطار پالس شکل ۵ است.
شکل ۸- یک قطار پالس مستطیلی نامتقارن با عرض پالسهای \( U \)، دوره تناوب \( T \) و اندازه \( A \). این قطار پالس به صورت جمع مستطیلهای شیفت داده شده به فرم آنچه که در شکل ۶ آمده است، نیز قابل نمایش است.
میتوانیم این قطار پالس را به صورت یک جمع نامحدود از مستطیلهای شیفت داده شده بیان کنیم:
$$ f(t)=A \sum_{k=-\infty}^{\infty} rect \left(\frac{t-kT-U/2}{U} \right) $$
حال، تبدیل هر کدام از مستطیلهای داخل جمع را میدانیم:
$$ rect \left(\frac{t-kT-U/2}{U} \right) \Leftrightarrow \underbrace{ \frac{A}{s}(1-e^{-sU}) }_{\mathcal{L} \ for \ rect} \underbrace{ e^{-kTs} }_{Phase for shift} $$
جمع تمامی موارد بالا نتیجه میدهد:
$$ F(s) = \frac{A}{s}(1-e^{-sU}) \sum_{k=0}^{\infty} e^{-kTs} $$
ناحیه همگرایی این تبدیل لاپلاس چیست؟ ناحیه همگرایی برای هر مستطیل تبدیل شده، شامل کل صفحه مختلط میشود (هر مقدار \( \sigma \)، اما تعداد بینهایت تبدیل شیفت فاز داده شده با هم جمع میشوند و در نتیجه، همگرایی به این جمع نامحدود نیز بستگی دارد.
نیاز داریم تا شرایط \( \sigma \) برای این همگرایی این جمع نامحدود را بررسی و درک کنیم:
$$ \sum_{k=0}^{\infty} e^{-ksT} = \sum_{k=0}^{\infty} (e^{-sT})^k $$
از مبحث سری هندسی، میدانیم:
$$ \sum_{k=0}^{N-1} a^k = \frac{1-a^N}{1-a} $$
در اینجا، \( a=e^{-sT}=e^{-\sigma T – i 2 \pi f T} \). برای اینکه \( a^N \to 0 \) نیاز داریم که \( \sigma>0 \) و در این حالت، تبدیل لاپلاس همگرا میشود.
قطار پالس مستطیلی متقارن
در نهایت، بیایید نگاهی به قطار پالس متقارن که در شکل ۵ نشان داده شده و در شکل ۹ تکرار شده است، داشته باشیم.
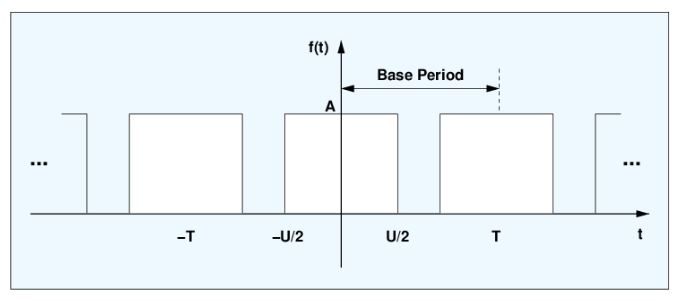
شکل ۹- قطار پالس مستطیلی متقارن (تکرار شده شکل ۵)
نیاز هست تا بخش زمان-مثبت این تابع را نشان دهیم. تعداد بینهایت مستطیلهای یکسان که به مرکز \( kT \) برای \( k\ge 1 \) هستند، داریم و یک مستطیل به مرکز \( U/4 \) و عرض \( U/2 \) و ارتفاع \( A \). میتوانیم از تابع \( rect \) در اینجا استفاده کنیم:
$$ f(t) = A.rect \left(\frac{t-U/4}{U/2} \right) + \sum_{k=1}^{\infty} A. rect \left(\frac{t-kT}{U} \right) $$
به سادگی تبدیل قابل محاسبه است:
$$ F(s) = \frac{A}{s}(1-e^{sU/2})+\frac{A}{s}(1-e^{-sU}) \sum_{k=1}^{\infty} e^{-ksT} $$
ناحیه همگرایی، \( \sigma>0 \) است به همان دلیلی که برای قطار پالس مستطیلی نامتقارن ذکر شد.
تبدیل لاپلاس معکوس
تبدیل لاپلاس معکوس به سادگی تبدیل فوریه معکوس که تفاوت اندکی با تبدیل فوریه مستقیم دارد، نیست. در اینجا ما باید انتگرال روی مسیر کانتور محاسبه کنیم اگر بخواهیم به صورت مستقیم تبدیل لاپلاس معکوس را محاسبه کنیم. فرمول آن عبارت است از:
$$ \mathcal{L}^{-1} [F(s)] = f(t) = \frac{1}{2 \pi i} \int_{c-i \infty}^{c+ i \infty} F(s)e^{st} ds. $$
مقدار ثابت c هر عدد حقیقی در ناحیه همگرایی میتواند باشد. در موارد کاربردی، همچون تئوری کنترل یا تحلیل مدار، محاسبه مستقیم تبدیل لاپلاس معکوس رایج نیست. به جای آن، عبارت تبدیل لاپلاس به صورت ترکیبی شامل تبدیل لاپلاسهای شناخته شده در میآید و تبدیل معکوس کلی از طریق جدولهای تبدیل لاپلاس و ترکیب آنها با هم با توجه به خطی بودن این تبدیل، بدست میآید.
کاربرد در معادلات دیفرانسیل
تبدیل لاپلاس، اغلب در مسائل کنترل و در تحلیل معادلات دیفرانسیل در مدارهای الکتریکی (شامل مقاومت، خازن و سلف) یا سیستمهای دینامیکی دیگر مورد استفاده قرار میگیرد. به زودی سراغ تبدیل Z نیز که در واقع تبدیل لاپلاس برای سیستمهای زمان-گسسته است و معمولا به سیستمهای کنترلی دیجیتال و مسائل مرتبط با مخابرات دیجیتال اعمال میشود، خواهیم رفت. در آن شرایط، معادلات دیفرنس ( به جای دیفرانسیل) مورد توجه خواهد بود و تبدیل Z، ابزار اصلی تحلیل است.
اجازه دهید تا نشان دهیم که چرا تبدیل لاپلاس یک ابزار عالی برای حل معادلات دیفرانسیل است. ایده این است که معادلات دیفرانسیل پیچیده قابل تبدیل به مجموعهای ساده از معادلات چندجملهای است که خیلی سادهتر از معادلات اصلی قابل حل است. از این طریق، راهحل حوزه زمان مطلوب با استفاده از تبدیل معکوس لاپلاس قابل دستیابی است.
معادله دیفرانسیل مرتبه دو زیر را در نظر بگیرید:
$$ a f”(t) + b f^{\prime}(t) +c f(t) +d =0 $$
با فرض معلوم بودن شرایط اولیه \( f(0^-), f'(0^-) \) و ۴ ضریب ثابت در معادله، \( f(t) \) چه خواهد بود؟ با تبدیل معادله، تابع زیر از متغیر \( s \) را بدست میآوریم:
$$ a[s^2 F(s) -s f(0) -f'(0)] +b [sF(s) -f(0^-)] +cF(s) +d/s =0 $$
با فاکتورگیری داریم:
$$ \begin{aligned} F(s) [as^3 + bs^2 +cs] -a f(0^-) s^2-(af'(0^-)+bf(0^-))s+d \\ \\ =F(s)[as^3+bs^2 +cs]-As^2-Bs-C \end{aligned} $$
که در آن \( A=af(0^-), B=af'(0^-), C=-d \). میتوانیم با استفاده از جبر، \( F(s) \) را حل کنیم:
$$ F(s) = \frac{As^2+Bs+C}{s(as^2+bs+s)} $$
مشخص است که \( F(s) \) تابعی گویا (کسری با چندجملهای در صورت و مخرج) است. نیاز هست که این تابع گویا برحسب توابعی که تبدیل لاپلاسهای آنها را میشناسیم همچون \( 1/(s+a) \)، بیان شود. خوشبختانه چنین توابع گویایی قابل توصیف به صورت جمع توابع گویای سادهتر هستند. به عبارت دیگر، میتوانیم مخرج کسر تابع گویا را به فاکتورهای تشکیل دهنده آن تجزیه کنیم و سپس تابع را به صورت جمع وزندهی شده فاکتورها در مخرج به صورت اجزاء مستقل بیان کنیم:
$$ \begin{aligned} \frac{P(s)}{Q(s)} = \frac{P(s)}{(s-r_1)(s-r_2)…(s-r_N)} \\ \\ =\frac{X_1}{(s-r_1)} + \frac{X_2}{(s-r_2)} + ….+ \frac{X_N}{(s r_N)} \end{aligned} $$
که \( N \) درجه \( Q(S) \) است. زمانیکه مقادیر \( r_j \) یکتا نباشند، شرایط مقداری پیچیده میشود. در اینجا فرض میکنیم که یکسان هستند. بازگشت به معادله بالا منجر به معادله زیر میشود:
$$ \frac{X_1}{s}+\frac{X_2}{s-r_1}+\frac{X_3}{s-r_2}=\frac{As^2+Bs+C}{s(as^2+bs+c)} = F(s) $$
برای \( X_1 \) عبارت \( sF(s) \) را در نظر بگیرید:
$$ sF(s)=\frac{As^2+Bs+C}{as^2+bs+c} = X_1+\frac{sX_2}{s-r_1}+\frac{sX_3}{s-r_2} $$
که برای \( s=0 \) باید صحیح باشد، بنابراین داریم \( X_1=C/c \). به طور مشابه، با در نظر گرفتن \( (s-r_1)F(s) \) و تعیین مقدار آن در \( s=r_1 \)، داریم \( X_2=C/(r_1(r_1-r_2)) \). در نهایت \( X_3=C/(r_2(r_2-r_1)) \).
میتوانیم تبدیل لاپلاس معکوس را برای عبارت بالا حساب کنیم زیرا هر بخش از \( F(s) \) در فرم جدید آن قابل تبدیل معکوس گرفتن است: